Простые механизмы: рычаг, равновесие сил на рычаге. Элементы биомеханики
Приводит к изменению длины мышцы под влиянием нервных импульсов. Мышцы действуют на кости рычагов, соединяющихся при помощи суставов. При этом каждая мышца действует на сустав только в одном направлении. Если мышца перекидывается через сустав с одной кости на другую, то она называется односуставной , а если идет мимо двух или нескольких суставов, - двусуставной или многосуставной . Мышцы приводят в движение не только отдельные части скелета, к которым они прикрепляются, но могут способствовать более сложными движениям, изменяя положения костей, находящиеся на их пути. Мышцы (или группы мышц) выполняющие определенное движение получили название агонистов (например, мышца агонист сгибания предплечья - двуглавая мышца плеча). Отдельные мышцы или группы мышц выполняют одинаковые функции, а также могут дополнить друг друга своими усилиями. К таким мышцам относятся синергисты. Синергисты - это мышцы, выполняющие одинаковую функцию и при этом усиливающие друг друга. Так, например, действуют короткая, длинная и большая приводящие мышцы бедра. Антагонисты - это мышцы, выполняющие противоположные функции, т. е. производящие противоположные друг другу движения. Другими словами, антагонистами называются такие две мышцы (или группы мышц) одного сустава, которые при сокращении осуществляют тягу в противоположную сторону и способны выполнять противоположную работу (сгибания - разгибания), т.е. одни мышцы сокращаются, другие же находятся в растянутом состоянии. Слабое сокращение мышцы-антагониста позволяет нам совершать плавные движения. Например: двуглавая мышца плеча осуществляет сгибание в локтевом суставе, а трехглавая мышца плеча - разгибание.
Самую многочисленную группу среди поперечно-полосатых мышц составляют мышцы, прикрепляющиеся к костям. Действие этих мышц осуществляется системой рычагов, так как кости соединяются между собой суставами. В биомеханике выделяют три рода рычагов: рычаг равновесия, рычаг силы и рычаг скорости.
Рычаг первого рода - двуплечий, это рычаг равновесия или покоя. У него точка опоры лежит между точкой приложения силы и точкой сопротивления (груз). Примерами такого рычага может служить соединение позвоночника с черепом (рис.5.4I), суставы между позвонками, соединения таза с бедренными костями.
Рычаг второго рода - одноплечий, это рычаг силы . У него точка сопротивления, подлежащая перемещению, лежит между точкой опоры и точкой приложения силы. Пример такого рычага представляет собой стопа (рис. 5.4II). Опираясь на головки плюсневых костей, человек поднимает при помощи мышц, прикрепляющихся к пяточной кости, всю тяжесть своего тела. Это происходит во время ходьбы при каждом шаге в тот момент, когда стопа отделяется от земли, чтобы передвинуться вперед, а также в том случае, если человек становится на носки.
Третий вид рычага - рычаг скорости (рис. 5.4III). У него точка приложения силы находится между точкой опоры и точкой сопротивления. Пример - локтевой сустав при сгибании. В этом случае точка опоры лежит в локтевом суставе, точка приложения силы - в области бугристостей локтевой и лучевой костей, т. е. несколько кпереди от точки опоры, точка сопротивления - на дистальном конце руки, т. е. значительно дальше от точки опоры. Такой рычаг приводит к выигрышу в скорости, но к потере в силе.


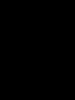
Рис. 5.4. Схема действия мышц на костные рычаги:
I - рычаг равновесия;
II - рычаг силы;
III - рычаг скорости.
А - точка опоры;
Б - точка приложения силы;
В - точка сопротивления.
Анализируя работу мышц, можно выделить три режима их работы :
1) преодолевающую работу мышц - выполняется в том случае, когда сила сокращения мышц изменяет положение части тела, конечности или ее звена, с грузом или без него, преодолевая силу сопротивления;
2) уступающую работу мышц - называют работу, при которой сила мышцы уступает действию силы тяжести части тела (конечности) и удерживаемого ею груза.
3) удерживающую работу - выполняется, если силой мышечных сокращений тело или груз удерживается в определенном положении без перемещения в пространстве. Например, человек стоит или сидит, не двигаясь, или держит груз в одном и том же положении. Сила мышечных сокращений уравновешивает массу тела или груза. При этом мышцы сокращаются без изменения их длины.
Преодолевающую и уступающую работу, когда сила мышечных сокращений перемещает тело или его части в пространстве, можно рассматривать как динамическую работу. Удерживающая работа, при которой движения всего тела или части тела не происходит, является работой статической .
На тело человека всегда действуют силы тяжести, силы инерции, силы сопротивления среды и мышечные силы тяги, которые взаимодействуют и вызывают различные движения и перемещения тела и его частей в пространстве. Отдельные кости скелета можно представить себе как рычаги, на которые действуют мышечные силы, силы тяжести или другие внешние силы. Суставы, связывающие кости в звенья, обеспечивают необходимую подвижность частей тела, которая зависит не только от формы суставов, но и от работы мышц.
В механике рычагом называют твёрдое тело, имеющее точку опоры, около которой оно может вращаться под влиянием противодействующих друг другу сил. По отношению точек приложения силы мышцы и силы сопротивления к точке опоры различают рычаги первого ивторого рода . Если опора располагается между точками приложения сил, то это рычаг первого рода. Если же обе силы приложены с одной стороны опоры, то это рычаг второго рода. Для равновесия рычага первого рода силы должны быть направлены в одну сторону, а для равновесия рычага второго рода – в разные стороны. Основное свойство рычага любой формы при равновесии выражается равенством моментов сил.
Рычаг первого рода (рычаг равновесия ). Примером такого рычага может служить череп с точкой опоры в атланто-затылочном сочленении, лежащей на фронтальной оси этого сустава. Точка приложения силы тяжести головы (центр тяжести головы) находится кпереди от точки опоры, точки приложения сил мышечных тяг разгибателей головы и шеи – кзади. Таз так же является рычагом первого рода с точкой опоры на поперечной оси тазобедренного сустава. В зависимости от положения туловища общий центр тяжести тела (ОЦТ) может занять положение кпереди или кзади от поперечной оси тазобедренного сустава. В этом случае равновесие тела обеспечивает сила мышечной тяги разгибателей позвоночного столба (ОЦТ - кпереди) или сгибателей (ОЦТ - кзади).
Рычаги второго рода имеют две разновидности. Первый, именуемый рычагом силы, характеризуется тем, что плечо мышечной тяги больше плеча силы тяжести. Примером такого рычага является стопа с точкой опоры на поперечной оси плюснофаланговых суставов. Сила тяжести тела приходится на таранную кость. Сила мышечной тяги трёхглавой мышцы голени направлено кверху, точка её приложения – пяточный бугор. Соответственно, при сгибании стопы трёхглавая мышца развивает усилие меньше чем тяжесть тела человека.
Вторая разновидность рычага второго рода именуется рычагом скорости .
В этом рычаге плечо силы тяжести превышает плечо силы мышечной тяги, то есть для преодоления силы тяжести мышцы должны развивать усилие больше, чем тяжесть звена тела или груза, удерживаемого им. Примером может служить предплечье с точкой опоры на поперечной оси локтевого сустава.
Одни и те же соединения костей могут выступать в определённых условиях, как рычаги первого, так и второго рода. Так, например, череп при свободном прямом держании головы является рычагом первого рода. При висе на зубах (как это делают артисты цирка) или при захвате головы под нижней челюстью в различных видах борьбы череп будет являться рычагом второго рода. В этих случаях внешним силам, разгибающим голову, будут противодействовать силы тяг всех мышц, прикрепляющихся к подъязычной кости, длинной мышцы головы, передней и латеральной прямых мышц головы. Стопа, как рычаг силы (рычаг второго рода) при некоторых условиях может выступать как рычаг скорости и рычаг равновесия. Так, например, в том случае, когда стопа не опирается о землю и свободно разгибается в голеностопном суставе, она будет функционировать как рычаг скорости. При ударе по мячу в футболе тыльной стороной стопы точка приложения равнодействующей силы мышц разгибателей стопы (передняя большеберцовая мышца, длинный разгибатель пальцев, длинный разгибатель большого пальца стопы) и точка приложения силы тяжести мяча будут расположены по одну сторону от поперечной оси вращения голеностопного сустава. Силы будут направлены в противоположные стороны, плечо равнодействующей силы мышц меньше плеча силы тяжести мяча, то есть в данном случае стопа будет являться рычагом скорости (рычаг второго рода).
В качестве рычага равновесия (рычага первого рода) стопа будет функционировать, например, при отталкивании тела от водной среды во время плавания стилем брасс, где силы тяги мышц сгибателей стопы будут противодействовать сопротивлению водной среды.
Знания рычагового принципа опорно-двигательного аппарата применяются при разработке спортивных тренажеров, с помощью которых удаётся нагружать как функциональные группы мышц, так и отдельные мышцы и даже определённые пучки мышц.
ОСНОВНАЯ
Козлов В.И. Анатомия человека. - М., 1978. - 547 с.
Иваницкий И.О. Анатомия человека. - Т. 1. - М., 1956. - 548 с.
Иваницкий Н.О. Анатомия человека. - М., 1985. – 544 с.
Дополнительная
Гладышева А.А. Анатомия человека. - М., 1977. - 343 с.
Привес М.Г. и др. Анатомия человека. - А., 1969. - 343 с.
Сапин М.Р., Билич Г.А. Анатомия человека. - М., 1989. - 544 с.
Синельников Р.Д. Атлас анатомии человека. - Т. 1. - М., 1972. - 458 с.
Синельников Р.Д. Атлас анатомии человека. - Т. 2. - М., 1973. - 468 с.
Синельников Р.Д. Атлас анатомии человека. - Т. 3. - М., 1974. - 399 с.
Работу двигательного аппарата человека обычно излагают с позиций общих законов механики, вполне применимых для оценки системы опорно-двигательного аппарата как системы рычагов. Рычагом называется всякое твердое тело, способное совершать вращательные движения около оси, на плечи которого действуют две противоположные силы: движущая сила (мышечные сокращения) и сила сопротивления. В зависимости от величины движущей силы и силы сопротивления возможно равновесие или движение рычага. Для понимания равновесия или движения рычага необходимо иметь определенное представление о плече рычага и о моменте вращения силы.
Плечом рычага называют расстояние оси вращения (О) до точки приложения силы (ОА и ОБ). Плечом силы называют кратчайшее расстояние - перпендикуляр от оси вращения до вектора силы или его продолжения (OA 1 и OБ 1) (рис. 158).
158. Схема рычага. Плечи рычага (ОА и ОБ), плечи сил (OA 1 и OБ 1)
Участие каждой мышцы в выполнении движений зависит не только от величины подъемной силы, но также и от величины плеча рычага, что определяется моментом силы. Моментом силы называется произведение силы на ее плечо. Моментом силы F I будет произведение F I ·OA I или F I ·Sin ОА; моментом силы F II будет F II ·OБ I , или F II ·Sin·OБ. Таким образом, условие для равновесия рычага достигается тогда, когда сумма моментов сил, действующих на него, относительно оси вращения равна нулю. Если равенство моментов сил нарушается, то рычаг начинает вращаться в направлении той силы, момент которой больше. Момент силы является непостоянной величиной, обусловленной положением одних костей по отношению к другим, образующим данное сочленение. Поэтому при сгибании в суставе будет нарастать плечо рычага сгибателей и соответственно момент силы, т. е. увеличивается угол подхода сухожилия к мышце, что способствует повышению подъемной силы мышцы. В большей части случаев мышцы прикрепляются вблизи суставов и подходят к костям под острым углом. При этом плечо силы меньше плеча сопротивления; при подобном прикреплении мышцы проигрывают в силе.
В опорно-двигательной системе имеются образования, способствующие увеличению плеча силы мышц, благодаря чему значительно повышается момент силы. К этим образованиям относятся сесамовидные кости, блоки, костные отростки и бугры, разнообразные выступы и шероховатости. За счет этих образований значительно возрастает момент силы мышц. Следовательно, сила мышцы зависит не только от количества мышечных волокон, но и от плеча рычага.
Виды рычагов . В зависимости от расположения движущей силы (мышечное сокращение) и силы сопротивления относительно оси вращения различают рычаги первого, второго и третьего рода.
Рычаг первого рода является двуплечим. Обе силы имеют одинаковое направление, а между ними находится ось вращения данного рычага (рис. 159). Рычаг первого рода называют также рычагом равновесия. Например, атлантозатылочное сочленение и тазобедренный сустав представляют оси вращения рычагов первого рода, по сторонам от которых располагаются плечи рычагов.

Рычаг второго рода - одноплечий рычаг, так как приложения сил имеют противоположные направления. Движущая сила оказывает действие на длинное плечо рычага, а сила сопротивления - на короткое плечо (рис. 160). Например, в голеностопном суставе одна сила действует вверх, другая - вниз. Давление, которое возникает в оси вращения рычага, соответствует разности действующих сил. Действие мышцы в конструктивной особенности рычага второго рода направлено на выполнение движений, требующих большой мышечной силы, поэтому рычаг второго рода называют также рычагом силы.

Рычаг третьего рода хотя и является одноплечим рычагом, но его отличие от рычага второго рода заключается в том, что сила действует на короткое плечо, а плечо сопротивления - на длинное (рис. 161). Рычаг третьего рода можно назвать рычагом скорости. Например, при выполнении сгибания в локтевом суставе длинное плечо силы - предплечье - совершает больший размах движений, чем короткое плечо силы, идущей от лучевой бугристости до локтевого сустава. Таким образом, при действии на короткое плечо мышца выигрывает в скорости и расстоянии и проигрывает в силе.

161. Предплечье как рычаг третьего рода. аб - направление равнодействующей мышц-сгибателей предплечья; вг - направление силы тяжести или сопротивления, же - плечо рычага силы тяжести; де - плечо рычага силы мышечной тяги; ж - плечо рычага силы тяжести; аз - "полезная" составляющая силы мышечной тяги; ак - другая составляющая этой силы; е - поперечная ось вращения локтевого сустава
В процессе построения движений у человека постоянно наблюдаются различные биомеханические особенности в смене, разделении и объединении различных рычагов, что необходимо для выполнения движений с наибольшей экономией энергии.
Кинематические цепи и степени свободы . Рассмотренная выше система костных рычагов первого, второго и третьего рода представляет рабочую систему в механическом значении только при определенных условиях. Одним из этих условий являются открытые и закрытые кинематические цепи и степени свободы. В замкнутой системе кинематической цепи оба конца какой-либо части тела закреплены (ребра, закрепленные передними и задними концами, или нижние конечности при стоянии).
При выполнении движений всегда вовлекаются цепи звеньев двигательного аппарата, которые закреплены на одном конце (рука, прикрепленная одним концом к лопатке) и представляют открытую кинематическую цепь.
В открытой системе кинематической цепи объем движений концевого отдела части тела определяется путем сложения суммы степеней свободы всех промежуточных звеньев, составляющих эту часть тела. Не ограниченное в свободе перемещающееся тело обладает шестью степенями свободы в виде поступательного движения в трех измерениях (вверх вниз, вперед назад, вправо влево) и вращательных движений в тех же измерениях. При скреплении одного звена тела в отношении другого ограничиваются степени свободы. При анализе возможных движений двух твердых тел (например, в шаровидном суставе), соприкасающихся в одной точке, видно, что тела способны переместиться взаимно в пяти направлениях и сохранить пять степеней свободы (рис. 162). Эти пять степеней свободы возможны в суставе только теоретически, а фактически подвижность в суставах имеет только три степени свободы. Это ограничение создают капсулы, связки и мышцы, окружающие сустав. Тремя степенями свободы обладают шаровидные суставы, двумя - эллипсоидные, седловидные и мыщелковидные (коленный сустав), одной - цилиндрические и блоковидные. Свободная верхняя конечность представляет открытую кинематическую цепь. Плечевой сустав обладает тремя степенями свободы, локтевой сустав - одной, суставы между костями предплечья - одной, лучезапястный сустав - двумя степенями свободы. Таким образом, кисть способна относительно туловища совершать перемещение по 7 степеням свободы в пределах радиуса всей верхней конечности, имея полную свободу движений.

Если сопоставить соединения в суставах с соединениями частей технической машины, то обнаруживаются существенные отличия. У машины движения единообразны и обладают только одной степенью свободы.
Как указывалось выше, движения у человека складываются в кинематические цепи и практически не осуществляются суставом с одной степенью свободы, поэтому двигательный аппарат человека не является рабочей машиной. Он становится ею только тогда, когда благодаря напряжению мышц исключаются и тормозятся движения, при которых как бы дополнительно возникают "запирающие" сустав механизмы. Тонус мышц и его чередование направляют движения в суставах, тем самым "... устраняются все свободы перемещения, за исключением одной" * . Следовательно, за счет перераспределения работы мышц и их тонуса возможно построение многих механизмов с различным числом степеней свободы.
* (Ухтомский А. А. Физиология двигательного аппарата. Сб. соч. Т. III Л., 1945, с. 145. )
Пара сил . Выше говорилось, что для совершения вращательного движения необходима пара сил, которая складывается из сил сокращающейся мышцы и силы давления или сопротивления, возникающего от трения одной кости о суставную поверхность другой. На примере сгибания в локтевом суставе видно (рис. 163), что сила тяги двуглавой мышцы может быть разложена на составляющие: АБ - момент силы и АГ - силу давления костей предплечья на плечевую кость. Сила, распространяющаяся по диагонали АВ, представляет давление, производимое вдоль плечевой кости, которому противодействует сила давления ДЖ, разложенная на ДЕ и ДЗ. Момент силы АБ вместе с силой ДЖ представляет пару сил, выполняющих сгибание в локтевом суставе. Если бы сила давления отсутствовала, а это возможно при отсутствии оси вращения, то вместо сгибания в локтевом суставе произошло бы подтягивание предплечья. Зная условия, при которых изменяется плечо силы тяги мышц, и механические условия проявления мышечной силы, легко понять, каким образом в процессе построения движений происходит потеря или увеличение мышечной силы.

163. Схема действия "пары сил" (по М. Ф. Иваницкому). ав - равнодействующая двуглавой мышцы плеча; дж - противодействие со стороны плечевой кости; аб - "полезная" составляющая двуглавой мышцы плеча; аг - другая составляющая той же мышцы, способствующая давлению предплечья на плечо в локтевом суставе; де - составляющие силы давления плечевой кости на предплечье; ад - плечо пары сил, из которых одна сила аб, а другая - де. Благодаря работе пары сил сокращение двуглавой мышцы плеча способствует сгибанию в локтевом суставе
Виды мышечной работы . С позиций биомеханики работа мышцы определяется в том случае, когда она производит перемещение части тела или тяжести на какое-либо расстояние. В действительности мышца выполняет работу, начиная с малейшего ее напряжения.
Мышечная работа разделяется на статическую и динамическую .
При статической работе часть мышц, напрягаясь, стремится уравновесить момент силы тяжести или силу сопротивления, что наблюдается при выравнивании или сохранении положения тела или его частей. При этом мышца не укорачивается, не удлиняется, а только напрягается. Статическая работа мышц необходима для сохранения вертикального положения тела или определенной позы. Выделяют три вида статической работы мышц: удерживающую, укрепляющую и фиксирующую. При удерживающей работе мышцы действуют своим моментом тяги, возникающей при сокращении, против момента силы тяжести. При укрепляющей работе напряжение мышц оказывает сопротивление разрыву. При фиксирующей работе сокращение мышц-антагонистов оказывает фиксирующее влияние на суставы.
При динамической работе движение в суставах происходит в результате несоответствия мышечных и механических сил. Динамическая работа мышц подразделяется на преодолевающую и уступающую. При преодолевающей работе мышечная сила больше противодействующей силы и в результате сокращения мышц преодолевается сопротивление, т. е. производится перемещение части тела или груза. Уступающая работа мышц возникает в том случае, если мышечные силы меньше момента противодействующих сил и наступает растягивание сокращенной мышцы. Этот вид работы мышц является важным и необходимым для обеспечения плавности и эластичности движений. Если бы не было подобного регулятора, движения были бы толчкообразными и малокоординированными.
Виды мышечной работы в процессе построения движений часто чередуются. Например, при отведении руки дельтовидная мышца выполняет преодолевающую работу. При удержании руки в горизонтальном положении производится статическая (удерживающая) работа мышцы, а при приведении этой руки - уступающая работа. Таким образом, в каждом виде движений на первый план выступает тот или другой вид мышечной работы.
Антагонисты и синергисты . К антагонистам относятся все мышцы, которые по своей функции действуют в сторону, противоположную другой группе мышц. Например, мышцы-сгибатели плеча являются антагонистами разгибателей плеча. К синергистам относятся все мышцы, которые, сокращаясь, одновременно действуют на сустав, находясь по одну сторону его оси. Примером могут служить сгибатели предплечья и плеча, вызывающие сгибание в локтевом суставе. Функции антагонистов и синергистов могут чередоваться. При выполнении сгибания и разгибания в лучезапястном суставе, с одной стороны, лучевой и локтевой сгибатели, а с другой - разгибатели кисти являются антагонистами. И, наоборот, если выполнять приведение и отведение кисти, они становятся синергистами.
Одно- и многосуставные мышцы . Односуставные мышцы оказывают влияние на один сустав, многосуставные - вовлекают в движение два сустава и более. Относительная длина одно- и многосуставных мышц различная. Односуставные мышцы имеют достаточную длину, чтобы обеспечить размах движений по полной дуге, возможной в данном суставе. Многосуставные мышцы относительно короче и не могут обеспечить такой размах во всех суставах при одновременном движении. В этом легко убедиться на примере работы мышц, находящихся около тазобедренного сустава. При разогнутом коленном суставе амплитуда сгибания в тазобедренном суставе будет меньше, чем при согнутом коленном суставе. При разогнутом коленном суставе мышцы задней поверхности бедра (а они многосуставные) натягиваются, так как их относительная длина будет меньше, и это тормозит сгибание в тазобедренном суставе. Следовательно, степень подвижности в суставах не только определяется формой сустава и его связочным аппаратом, но и зависит от длины мышц, которые не всегда могут использовать всю резервную возможность для сокращения и полностью выполнить движение. Особенностью функции многосуставных мышц является их участие в мышечной координации, т. е. приспособительной особенности организма. При мышечной координации значительно экономятся затраты мышечной энергии. При многих движениях необходимо активное сокращение только од носу ставных мышц, а в других суставах совершается движение за счет тонуса, эластичности многосуставных мышц и силы тяжести. Эта координирующая работа многосуставных мышц хорошо выражена на нижней конечности. При сокращении мышц, лежащих впереди тазобедренного сустава, происходит сгибание не только бедра, но и в коленном суставе. Сгибание в коленном суставе наступает вследствие относительной недостаточности длины многосуставных задних мышц бедра. Разгибание в голеностопном суставе совершается благодаря расслаблению икроножной мышцы. Следовательно, только сокращение одной передней группы мышц около тазобедренного сустава приводит без затраты энергии по принципу координации к выполнению движений в коленном и голеностопном суставах. При выполнении противоположного движения (разгибание в тазобедренном суставе) произойдет пассивное разгибание в коленном суставе за счет относительной недостаточности передних мышц бедра, а в голеностопном суставе наступит сгибание вследствие повышения тонуса икроножной мышцы.
Сложение сил сокращающихся мышц . При сокращении мышцы возникает активная двигательная сила, которая стремится сблизить punctum mobile и punctum fixum. Мышечная сила характеризуется степенью сокращения мышцы, способной при возбуждении удержать в этом состоянии груз до 4-6 кг на 1 см 2 поперечника мышцы. Величина силы зависит от исходной длины мышечных волокон. Предварительно, но не чрезмерно растянутая мышца развивает более высокое напряжение. Активная мышечная сила больше всего развивается в мышцах, построенных из длинных волокон (широкие и веретенообразные мышцы). Мышца может сократиться на 50-57% первоначальной ее длины, но ввиду ограничения степеней свободы суставов она сокращается, как правило, на 35%.
Активная мышечная сила группы мышц (синергистов или антагонистов) складывается из суммы подъемной силы каждой мышцы, а точка приложения этой силы располагается между местами прикрепления всех длинных мышц. Однако у человека только единичные мышцы занимают параллельное друг другу положение. Большей частью их равнодействующие находятся под определенным углом, образуя параллелограммы сил.
Параллелограммы сил . Располагаясь под углом друг к другу, мышцы тянут кость в различных направлениях. В этом случае движение кости совершается не по равнодействующей одной или второй мышцы, а по диагонали параллелограмма, построенного сокращающимися мышцами (рис. 164). Параллелограммы сил могут формироваться и целыми мышечными группами.

28 апреля в школе будет проходить научно-практическая конференция НОУ "Спектр".
Немного истории
Давным-давно, еще в 2005 году мы с моими учениками в школе организовали научное общество "Пифагорёнок", где занимались различной деятельностью от разбора олимпиадных задач, до исследовательских работ. Ежегодно, привлекая и других математиков школы, проводили конференции, затем вывозили ребят на конференции в Нальчик. Ежегодно наши ребята занимали призовые места на республиканских конкурсах. Все было как надо, у нас был свой устав, программа, требования. В конце года подводили итоги и каждому члену НОУ присваивались академические звания:
- «почетный академик» - победителям и призерам международных и российских, республиканских предметных олимпиад, смотров, конкурсов;
- «академик» - призерам областных и городских предметных олимпиад, конкурсов, смотров;
- «магистр» - победителям школьных олимпиад, смотров, конкурсов;
- «бакалавр» - призерам школьных олимпиад, смотров, конкурсов.
О нашем обществе тогда знали все. Гудели. На конференции в Нальчике как-то нам сказали, что не могут нам каждый раз давать призовые места, не вести много работ на конкурс. Что тоже сыграло свою роль. Когда член жюри, республиканского конкурса, при детях говорит "Ваши работы самые лучшие, но мы не можем дать больше одного места" ....
http://alfusja-bahova.ucoz.ru/index/nou_quot_pifagorenok_quot/0-5
Кстати, все ребята, которые тогда занимались в научном обществе без труда поступили в лучшие технические ВУЗы Москвы и Питера, на данный момент закончили успешно университеты. А одну девочку оставили в университете в Питере (не могу сейчас точно назвать названия вузов). Горжусь своими ребятами.
Но всему приходит конец. И нашему НОУ тоже. За эту работу мне никто ничего не оплачивал, а как только стали за это платить, "такая корова нужна самому", выяснилось, что "Пифагорёнок" нашей школе не нужен, создали новое общество "Спектр", где все проводится "спустя рукава", не хочу даже говорить об этом.
После одного пренеприятного случая перестала принимать с ребятами участия в школьных конференциях.
А в этом году, решила все же выйти на конференцию школьную со своими кружковцами. В среду приступили к проекту. Посмотрим, что получится.
На очередном занятии кружка приступили к исследовательскому проекту "Рычаг. Виды рычагов. Рычаги в быту человека".
Цель и задачи исследовательской работы:
- Изучить устройство и принцип действия рычага;
- Собрать механизм «Рычаг» с помощью Lego «Физика и технология»;
- Исследовать свойства рычага. Выяснить условие равновесия рычага;
- Анкетирование одноклассников;
- Исследовать использование рычага в доме, в быту, в технике, в спорте и развлечениях;
- Выводы.
Знаете ли вы?
Термин «рычаг» (англ. lever)происходит от французского слова levier, которое в переводе означает «поднимать»
С древних времен для облегчения своего труда человек использует различные механизмы, которые способны преобразовывать силу человека в значительно большую силу. Еще три тысячи лет назад при строительстве пирамид в Древнем Египте тяжелые каменные плиты передвигали и поднимали с помощью простых механизмов.
Рычаг – это жесткий стержень или твердый предмет, который служит для передачи силы. С помощью рычага можно изменять прикладываемую силу (усилие), направление и расстояние перемещения. В каждом рычаге обязательно присутствуют усилие, опора (или ось вращения) и нагрузка (груз). В зависимости от их взаимного расположения различают рычаги первого, второго и третьего рода.
На этом занятии разобрали устройство и принцип действия рычага. С помощью Лего собрали три рода механизма "Рычаг". Попытались провести первичное исследование. Узнали что у любого рычага есть точка опоры, точка приложения усилия и точка приложения нагрузки (т.е. груз)
Виды рычагов
В рычагах первого рода точка опоры расположена между точками приложения усилия и нагрузки.
Наиболее распространенными примерами рычага первого рода являются пила, лом, плоскогубцы и ножницы.

В рычагах второго рода точка опоры и точка приложения усилия находятся на противоположных концах, а точка приложения нагрузки расположена между ними. Самые часто встречающиеся примеры рычага второго рода – щипцы для раскалывания орехов, тачка, ключ для открывания бутылок.

В рычагах третьего рода точка опоры и точка приложения нагрузки находятся на противоположных концах, а точка приложения усилия – между ними. Наиболее известные примеры рычага третьего рода – пинцет и щипцы для льда.

В вашем браузере отключен JavaScript
На следующем занятии кружка продолжим свое исследование.
РS. На данном сайте много классных физиков, я рада была бы получить от Вас советы и рекомендации по нашему проекту. Не откажусь ни от какой помощи!!!
На данном уроке, тема которого: «Простые механизмы» мы поговорим о механизмах, которые помогают нам в работе. На стройках, на производстве, на отдыхе - везде мы нуждаемся в помощи. Такими помощниками выступают рычаги. Сегодня мы о них и поговорим, а также решим задачу и разберем несколько самых простых примеров из жизни.
На данном уроке речь пойдет о простых механизмах.
Простые механизмы - это устройства, с помощью которых работа совершается только за счет механической энергии. Нас окружают устройства, работающие за счет электроэнергии (см. рис. 1), за счет энергии сгорания топлива, но не всегда так было.
Рис. 1. Чайник, работающий за счет электроэнергии
Раньше всю работу можно было выполнить фактически руками, или с помощью животных, за счет ветра или течения воды (мельницы), то есть за счет механической энергии (см. рис. 2).



Рис. 2. Давние простые механизмы
И помогают в этом, облегчают выполнение работы, простые механизмы.
Наши силы ограничены, и это проблема. Мы, например, не можем за один раз поднять и перенести с одного места на другое тонну кирпичей. Зато мы можем потратить больше времени, пройти большее расстояние туда-сюда и перенести кирпичи по четыре за один подход, или сколько сможем унести. Как быть с шурупом, который нужно вкрутить в дерево? Вкрутить его голыми руками мы не можем. Вкрутить его по кусочку, как гору кирпичей по кирпичику, тоже нельзя. Нужно использовать механизм, отвертку. С ней нам приходится прокрутить шуруп на несколько оборотов, чтобы он вошёл в дерево хотя бы на сантиметр. Но зато это несравненно легче, чем руками.
Рассмотрим такой простой механизм, как, например, лопата. Конечно, она облегчает выполнение работы, с ней намного легче копать землю, чем руками. Мы воткнули лопату в землю. Чтобы поднять ком земли, нужно надавить на черенок. Где вы будете давить, чтобы было легче? Опыт подсказывает, что надо надавить, то есть приложить силу, поближе к концу черенка (см. рис. 3).

Рис. 3. Выбор точки приложения силы
Попробуйте приложить силу ближе к полотну лопаты, поднять ком земли станет намного тяжелее. Прикладывая прежнюю силу, вы уже ничего не поднимете. Именно поэтому лопаты с коротким черенком, например саперные, делаются с маленьким полотном: много земли с коротким черенком все равно не поднимешь.
Лопата представляет собой рычаг. Рычаг - это твердое тело, имеющее неподвижную ось вращения (чаще всего это точка опоры или подвеса). На него действуют силы, которые стремятся повернуть его вокруг оси вращения. У лопаты ось вращения - это точка опоры на верхнем краю ямки (см. рис. 4).

Рис. 4. Ось вращения лопаты
На полотно лопаты с некоторой силой действует комок земли, который мы поднимаем, а на черенок, с меньшей силой, - наши руки (см. рис. 5).

Рис. 5. Действие сил
Рассмотрим другой пример: все катались на качелях-балансире (см. рис. 6).

Рис. 6. Качели-балансир
Это тоже рычаг: есть неподвижная ось вращения, вокруг которой качели вращаются под действием сил тяжести детей.
Чтобы перевесить своего друга, сидящего на противоположном сидении, поднять его, вы сядете на самый край качели. Если сядете ближе к опоре качели, можете не перевесить. Тогда нужно на ваше место посадить кого-то взрослого и тяжелого (см. рис. 7).

Рис. 7. Приложенная сила должна быть больше, чем на краю
В такой точке приложения силы нужна большая сила, чем когда сила прикладывалась к краю качели (см. рис. 8).

Рис. 8. Приложение сил
Как вы уже заметили, чем дальше от точки опоры мы приложим силу, тем меньшая нужна сила для совершения одной и той же работы. Причем сила нужна во столько же раз меньшая, во сколько раз больше плечо рычага. Плечо рычага - это расстояние от точки опоры или подвеса рычага до точки приложения силы (см. рис. 9).

Рис. 9. Плечо рычага и сила
Силы будем прикладывать перпендикулярно рычагу.
Направление силы, действующей на рычаг
В каком направлении вы будете действовать на лопату, чтобы поднять землю? Вы приложите силу к лопате так, чтобы она оборачивалась вокруг точки опоры, то есть перпендикулярно черенку (см. рис. 10).

Если вы будете действовать вдоль черенка, землю это не поднимет, вы разве что вытащите лопату из земли или воткнете ее глубже. Если вы будете давить на черенок под углом, силу можно представить как сумму двух сил: вы давите перпендикулярно черенку и одновременно толкаете или тащите вдоль черенка (см. рис. 11).

Рис. 11. Действие силы вдоль черенка
Вращать лопату будет только перпендикулярная составляющая.
Итак, у нас есть рычаг и две силы, которые на него действуют: вес груза и сила, которую мы прикладываем, чтобы этот груз поднять. Мы выявили, что чем больше плечо рычага, тем меньше нужна сила, чтобы уравновесить рычаг. Причем во сколько раз больше плечо рычага, во столько раз меньше сила. Математически это можно записать в виде пропорции:
При этом неважно, приложены силы по разные стороны от точки опоры или по одну сторону. В первом случае рычаг назвали рычагом первого рода (см. рис. 12), а во втором - рычагом второго рода (см. рис. 13).

Рис. 12. Рычаг первого рода

Рис. 13. Рычаг второго рода
Работа с лопатой
Мы рассмотрели, как лопата позволяет нам легче копать землю. Она опирается на край образовавшейся ямки в земле, это будет осью ее вращения. Вес земли приложен к короткому плечу рычага, мы руками прикладываем силу к длинному плечу рычага (см. рис. 14).

Рис. 14. Приложение сил к лопате
Причем во сколько раз отличаются плечи рычага, во столько же раз отличаются силы, приложенные к этим плечам.
Итак, мы приподняли ком земли, но дальше нужно взять лопату двумя руками, поднять ее полностью и перенести землю. Где мы возьмемся за черенок лопаты второй рукой? Всё просто, когда мы уже знаем принцип работы рычага. Вторая рука станет новой опорой рычага. Она должна быть расположена так, чтобы снова дать выигрыш в силе, она должна снова разделить рычаг на короткое и длинное плечи. Поэтому мы возьмем лопату как можно ближе к полотну лопаты. Попробуйте поднять лопату, взявшись обеими руками за край - у вас может ничего не получиться даже с пустой лопатой.
Принцип, по которому работает рычаг, используется очень часто. Например, плоскогубцы - рычаг первого рода (см. рис. 15). Мы действуем на ручки плоскогубцев с силой , а плоскогубцы действуют на кусок проволоки, трубку или гайку с силой , по модулю намного большей, чем . Во столько раз большей, во сколько раз больше:

Рис. 15. Пример рычага первого рода
Еще один рычаг - консервный нож, только теперь точки приложения находятся по одну сторону от точки опоры О. И снова мы прикладываем к ручке силу , а лезвие открывалки действует на жесть консервной банки с намного большей по модулю силой (см. рис. 16).

Рис. 16. Пример рычага второго рода
Во сколько раз больше, чем ? Во столько же, во сколько раз больше, чем :
Выигрыш в силе можно получить огромный, мы ограничены разве что длиной рычага и его прочностью.
Рассчитаем, какой длины должен быть рычаг, чтобы с его помощью хрупкая девушка массой 50 кг смогла приподнять автомобиль массой 1500 кг, надавив на рычаг всем своим весом. Точку опоры рычага разместим так, чтобы короткое плечо рычага было равно 1 м (см. рис. 17).

Рис. 17. Рисунок к задаче
В задаче описан рычаг (см. рис. 18).

Рис. 18. Условие задачи 1
Мы знаем, во сколько раз выигрыш в силе дает рычаг:
Силы прикладываются по разные стороны от опоры рычага, поэтому два плеча рычага в сумме составят его длину:
Мы описали математически процесс, заданный в условии. В нашем случае сила , действующая на плечо , - это вес автомобиля , а сила , действующая на плечо , - вес девушки .
Теперь осталось только решить уравнения и найти ответ.
Из первого уравнения найдем плечо .Бόльшая сила приложена к меньшему плечу рычага, значит - это и есть короткое плечо, равное 1 м.
![]()
![]()
Длина рычага равна:
Ответ: 31 м.
Как лопата копает сама?
Рассматривая примеры, мы не учитывали силу тяжести, действующую на рычаг.
Представьте, что мы воткнули лопату неглубоко в землю. Если лопата достаточно тяжелая, небольшую массу земли она сможет поднять без нашей помощи, нам даже не нужно будет прикладывать к черенку никакую силу. Лопата повернется вокруг оси вращения под действием сил тяжести, действующей на черенок лопаты (см. рис. 19).

Рис. 19. Поворачивание лопаты вокруг своей оси
Однако чаще всего вес рычага пренебрежимо мал по сравнению с силами, которые на него действуют, поэтому в нашей модели мы считаем рычаг невесомым.
На примере девушки и автомобиля мы увидели, что с помощью рычага можно выполнить такую работу, которую без рычага мы бы никогда не выполнили. С помощью рычага можно было бы сдвинуть даже Землю, о чем говорил Архимед (см. рис. 20).

Рис. 20. Предположение Архимеда
Проблема в том, что рычаг не на что опереть, нет подходящей точки опоры. И вы, конечно, представляете, какой невообразимой длины должен быть такой рычаг, ведь масса Земли равна 5974 миллиарда миллиардов тонн.
Слишком всё хорошо получается: мы можем почти неограниченно уменьшать силу, необходимую для выполнения работы. Должен быть подвох, иначе с рычагом наши возможности были бы безграничны. В чем подвох?
Используя рычаг, мы прикладываем меньшую силу, но при этом совершаем большее перемещение (см. рис. 21).

Рис. 21. Перемещение увеличивается
Мы передвинули черенок лопаты на вытянутую руку, но подняли землю всего на несколько сантиметров. Архимед, если бы всё-таки нашел точку опоры, за всю свою жизнь не успел бы повернуть свой рычаг так, чтобы сдвинуть Землю. Чем меньшую силу мы прикладываем, тем большее перемещение совершаем. А произведение силы на перемещение, то есть работа, остается постоянным. То есть рычаг дает выигрыш в силе, но проигрыш в перемещении, или наоборот.
Рычаги, которые используются «наоборот»
Не всегда рычаги используются для того, чтобы совершать работу, прикладывая меньшую силу. Иногда важно выиграть в перемещении, даже если при этом приходится прикладывать бόльшую силу. Так делает рыбак, которому нужно вытащить рыбу, переместить ее на большое расстояние. При этом он использует удочку как рычаг, прикладывая силу к ее короткому плечу (см. рис. 22).

Рис. 22. Использование удочки
Рычагом является и наша рука. Мышцы руки сокращаются, и рука сгибается в локте. При этом она может поднять какой-нибудь груз, совершить работу. При этом на кости предплечья действуют с некоторыми силами мышцы и груз (см. рис. 23).

Рис. 23. Наша рука - рычаг
Ось вращения предплечья - локтевой сустав. Из таких рычагов состоит весь наш опорно-двигательный аппарат. И сам термин «плечо рычага» назван так по аналогии с плечом одного из рычагов в нашем теле - руки.
Мышцы так устроены, что они при сокращении не могут укорачиваться на те полметра, на которые нам нужно поднять, например, чашку с чаем. Нужно выиграть в перемещении, поэтому мышцы крепятся ближе к суставу, к меньшему плечу рычага. При этом нужно приложить бόльшую силу, но для мышц это не проблема.
Рычаг - не единственный простой механизм, который облегчает нам выполнение работы.
Каким простым механизмом вы пользуетесь, когда поднимаетесь на первый этаж? Можно допрыгнуть до окна, если получится, и просто вскарабкаться в комнату. Мы привыкли совершать ту же работу по перемещению себя домой намного безопаснее и легче - поднимаясь по лестнице. Так мы проделываем больший путь, но прикладываем к себе меньшую силу. Если мы сделаем длинную пологую лестницу, подниматься станет еще легче, будем идти почти как по ровной поверхности, но путь проделать придется бόльший (см. рис. 24).

Рис. 24. Пологая лестница
Наклонная плоскость является простым механизмом. Всегда легче не поднимать что-то тяжелое, а втащить его под уклон.
Рассмотрим, как топор раскалывает древесину. Его лезвие заостренное и расширяется ближе к основанию, и чем глубже клин топора вгоняется в древесину, тем шире она раздается и в итоге раскалывается (см. рис. 25).

Рис. 25. Рубка дров
Принцип действия клина тот же, что и для наклонной плоскости. Чтобы раздвинуть части древесины на сантиметр, нужно было бы приложить огромную силу. К клину достаточно приложить меньшую силу, правда, придется совершить большее перемещение вглубь древесины.
По тому же принципу наклонной плоскости работают и винты. Присмотримся к шурупу: бороздка вдоль шурупа представляет собой наклонную плоскость, только обернутую вокруг стержня шурупа (см. рис. 26).

Рис. 26. Наклонная плоскость шурупа
И мы также без особых усилий вгоняем шуруп на нужную нам глубину. При этом, как обычно, проигрываем в перемещении: нужно сделать много оборотов шурупа, чтобы вогнать его на пару сантиметров. В любом случае это лучше, чем раздвинуть древесину и вставить туда шуруп.
Когда мы вкручиваем шуруп отверткой, мы еще больше облегчаем себе работу: отвертка представляет собой рычаг. Смотрите: сила, с которой на жало отвертки действует шуруп, приложена к меньшему плечу рычага, а мы своей рукой действуем на большее плечо (см. рис. 27).

Рис. 27. Принцип работы отвертки
Рукоятка отвертки толще, чем жало. Если бы у отвертки были ручки, как у штопора, выигрыш в силе был бы еще больше.
Мы так часто пользуемся простыми механизмами, что даже не замечаем этого. Возьмем обычную дверь. Сможете назвать три случая использования простого механизма в работе двери?
Обратите внимание, где находится ручка. Она всегда находится у края двери, подальше от петель (см. рис. 28).

Рис. 28. Местоположение ручки на двери
Попробуйте открыть или закрыть дверь, надавив на нее поближе к петлям, будет трудно. Дверь представляет собой рычаг, и чтобы для открытия двери было достаточно как можно меньшей силы, плечо этой силы должно быть как можно больше.
Присмотримся к самой ручке. Если бы она представляла собой голую ось, открыть дверь было бы трудно. Ручка увеличивает плечо, к которому приложена сила, и мы, прикладывая меньшую силу, открываем дверь (см. рис. 29).

Рис. 29. Ручка двери
Присмотримся к форме ключа. Думаю, вы сможете ответить, зачем их делают с широкими головками. А почему петли, на которых дверь держится, расположены не рядом друг с другом, а приблизительно на четверть высоты от краев двери? Вспомните, как мы брали лопату, когда поднимали ее - здесь тот же принцип. А еще можно обратить внимание на срезанный под углом язычок замка, на шурупы, которыми дверь прикручена к петлям (см. рис. 30).

Рис. 30. Петли двери
Как видите, простые механизмы лежат в основе всевозможных устройств - от двери и топора до подъемного крана. Мы используем их неосознанно, когда выбираем, например, где взяться за ветку, чтобы наклонить ее. Сама природа при создании человека использовала простые механизмы, когда создавала нашу опорно-двигательную систему или зубы с их клиновидной формой. И если вы будете внимательны, вы заметите еще множество примеров того, как простые механизмы облегчают выполнение механической работы, и сможете их использовать еще более эффективно.
На этом наш урок окончен, спасибо за внимание!
Список литературы
- Соколович Ю.А., Богданова Г.С Физика: Справочник с примерами решения задач. - 2-е издание, передел. - X.: Веста: Издательство «Ранок», 2005. - 464 с.
- Перышкин А.В. Физика: Учебник 7 класс. - М.: 2006. - 192 с.
- Virtuallab.by ().
- School.xvatit.com ().
- Лена24.рф ().
- Fizika.ru ().
Домашнее задание
- Что такое рычаг? Дайте определение.
- Какие примеры рычагов вы знаете?
- Длина меньшего плеча рычага 5 см, большего 30 см. На меньшее плечо действует сила 12 Н. Какую силу надо приложить к большему плечу, чтобы уравновесить рычаг?